Dual Pronged Mechanical Claw
What is this?
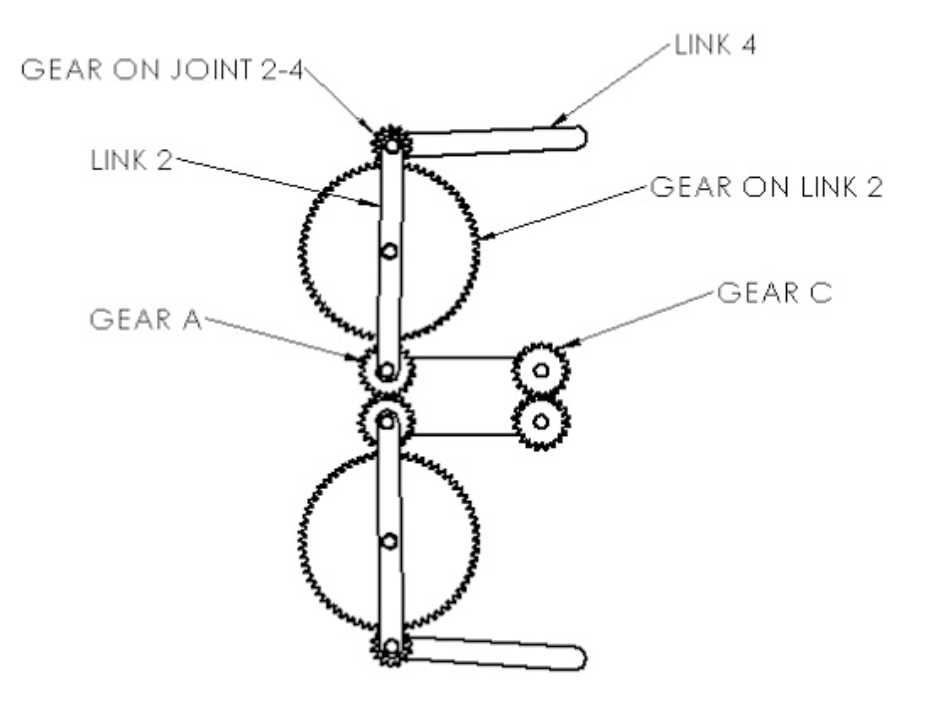
A Planar Gripper designed with two motors is capable of holding a 200 gram cup with a 50 millimeter diameter. The gripper design operates using 2 ordinary gear trains and 4 linkages. Two motors are attached to the gear trains respectively to open and close the claw. To view the source code (necessary for the mechanics calculations) please check out my Github.
How did we do it?
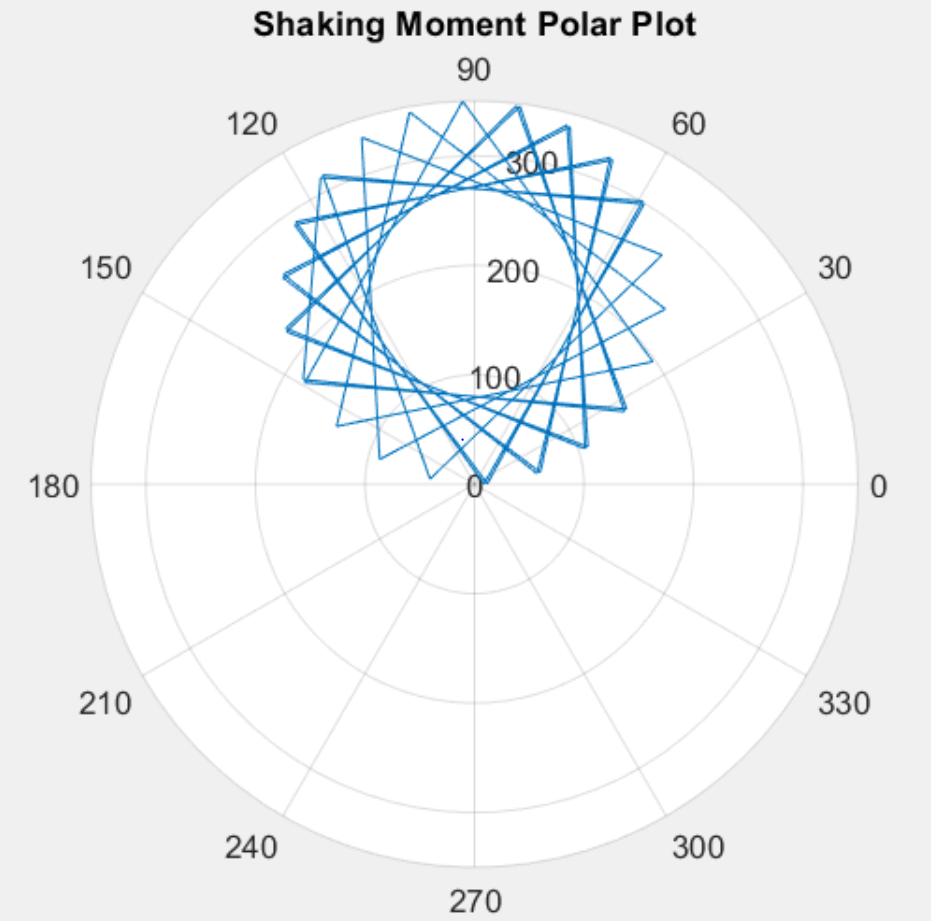

Post ideation, we mathematically modelled the necessary linkage calculations and tested the results via MATLAB. The updated claw models were created in SolidWorks and the final design was 3D printed.
Skills & Tools
- Software: SOLIDWORKS
- Language: MATLAB
Project Duration
March 28 - April 4 [2021]
Collaborators
Akansha Nagar, Rohan Syal, Celia Lin, Jacob Sunglao, Hinesh Maisuria