Search & Rescue Snake Robot
What is this?
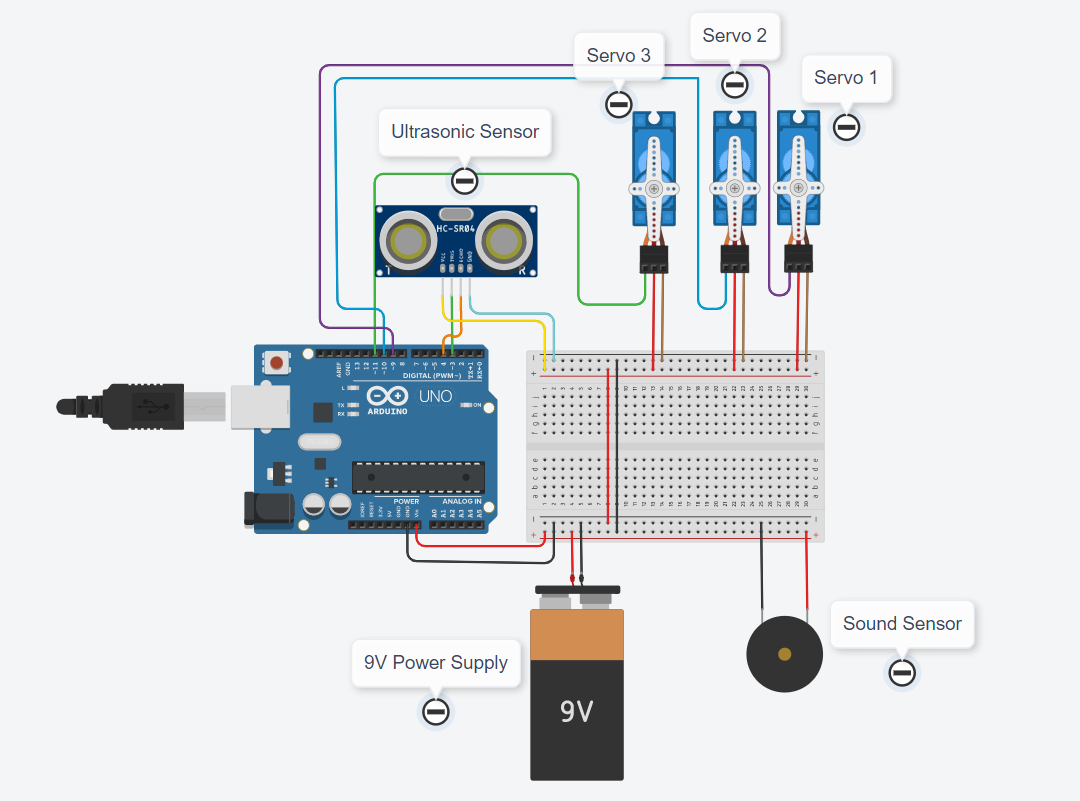
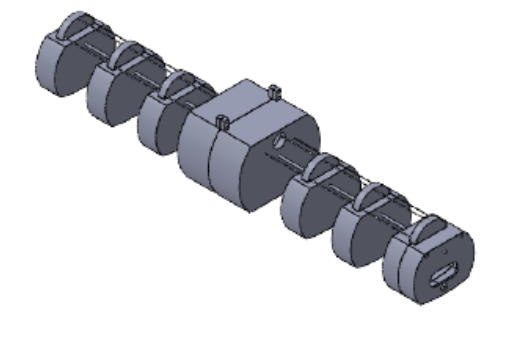
An autonomous Snake Robot purposed for search and rescue operations. The design is intended to move with a forward lateral undulation motion (in other words that characteristic 'S' shapes that snakes make). The continuum robot design (robot controlled by strings) relies on 3 servo motors, 2 calibrated sensors and a closed loop PID control system. To view the source code (necessary for the mechanics calculations) please check out my Github.
How did we do it?
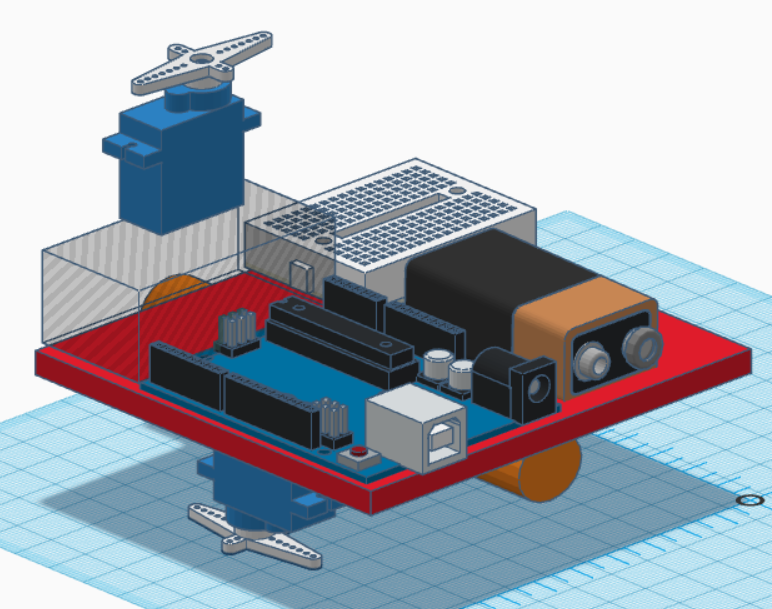
Due to the pandemic, my team and I operated virtually. We laid out initial design concepts, researched existing reference models and developed a proof-of-concept that contained two sensors with minimal motors. I tested circuitry with a development board and reviewed SolidWorks designs. Then we assembled the 3D printed robot.
Skills & Tools
- Software: SOLIDWORKS
- 3D Modeling Program: TinkerCAD
- Language: Python & C++
- IDE: Visual Studio Code
- Microcontroller: Arduino Uno
Project Duration
Jan 15 - March 20 [2021]
Collaborators
Akansha Nagar, Sujan Sribalan, Connor Bouwmans, Saran Gnanapandithana